 |
Eigen-unsupported
3.4.90 (git rev 67eeba6e720c5745abc77ae6c92ce0a44aa7b7ae)
|


|
|
Eigen-unsupported
3.4.90 (git rev 67eeba6e720c5745abc77ae6c92ce0a44aa7b7ae)
|
|
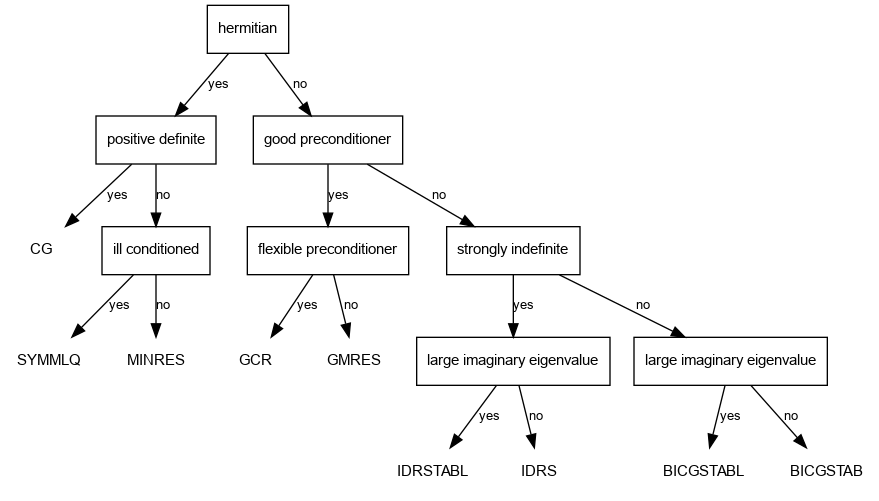
This module aims to provide various iterative linear and non linear solver algorithms. It currently provides:
Choosing the best solver for solving A x = b depends a lot on the preconditioner chosen as well as the properties of A. The following flowchart might help you.
Classes | |
| class | Eigen::DGMRES< MatrixType_, Preconditioner_ > |
| A Restarted GMRES with deflation. This class implements a modification of the GMRES solver for sparse linear systems. The basis is built with modified Gram-Schmidt. At each restart, a few approximated eigenvectors corresponding to the smallest eigenvalues are used to build a preconditioner for the next cycle. This preconditioner for deflation can be combined with any other preconditioner, the IncompleteLUT for instance. The preconditioner is applied at right of the matrix and the combination is multiplicative. More... | |
| class | Eigen::GMRES< MatrixType_, Preconditioner_ > |
| A GMRES solver for sparse square problems. More... | |
| class | Eigen::IDRS< MatrixType_, Preconditioner_ > |
| The Induced Dimension Reduction method (IDR(s)) is a short-recurrences Krylov method for sparse square problems. More... | |
| class | Eigen::IDRSTABL< MatrixType_, Preconditioner_ > |
| The IDR(s)STAB(l) is a combination of IDR(s) and BiCGSTAB(l). It is a short-recurrences Krylov method for sparse square problems. It can outperform both IDR(s) and BiCGSTAB(l). IDR(s)STAB(l) generally closely follows the optimal GMRES convergence in terms of the number of Matrix-Vector products. However, without the increasing cost per iteration of GMRES. IDR(s)STAB(l) is suitable for both indefinite systems and systems with complex eigenvalues. More... | |
| class | Eigen::IterationController |
| Controls the iterations of the iterative solvers. More... | |
| class | Eigen::MINRES< MatrixType_, UpLo_, Preconditioner_ > |
| A minimal residual solver for sparse symmetric problems. More... | |
Functions | |
| template<typename TMatrix , typename CMatrix , typename VectorX , typename VectorB , typename VectorF > | |
| void | Eigen::internal::constrained_cg (const TMatrix &A, const CMatrix &C, VectorX &x, const VectorB &b, const VectorF &f, IterationController &iter) |
| template<typename CMatrix , typename CINVMatrix > | |
| void | Eigen::internal::pseudo_inverse (const CMatrix &C, CINVMatrix &CINV) |
| void Eigen::internal::constrained_cg | ( | const TMatrix & | A, |
| const CMatrix & | C, | ||
| VectorX & | x, | ||
| const VectorB & | b, | ||
| const VectorF & | f, | ||
| IterationController & | iter | ||
| ) |
Constrained conjugate gradient
Computes the minimum of \( 1/2((Ax).x) - bx \) under the constraint \( Cx \le f \)
| void Eigen::internal::pseudo_inverse | ( | const CMatrix & | C, |
| CINVMatrix & | CINV | ||
| ) |
Compute the pseudo inverse of the non-square matrix C such that \( CINV = (C * C^T)^{-1} * C \) based on a conjugate gradient method.
This function is internally used by constrained_cg.
 1.9.1
1.9.1